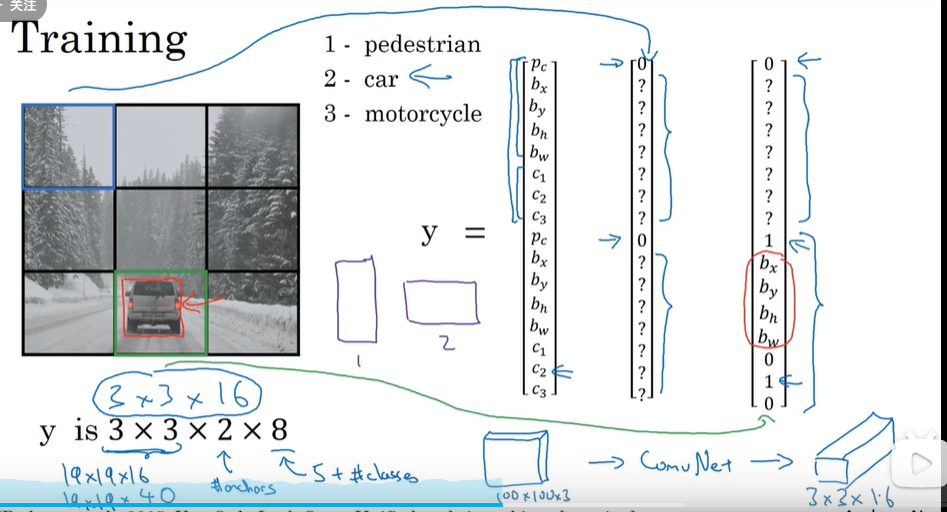
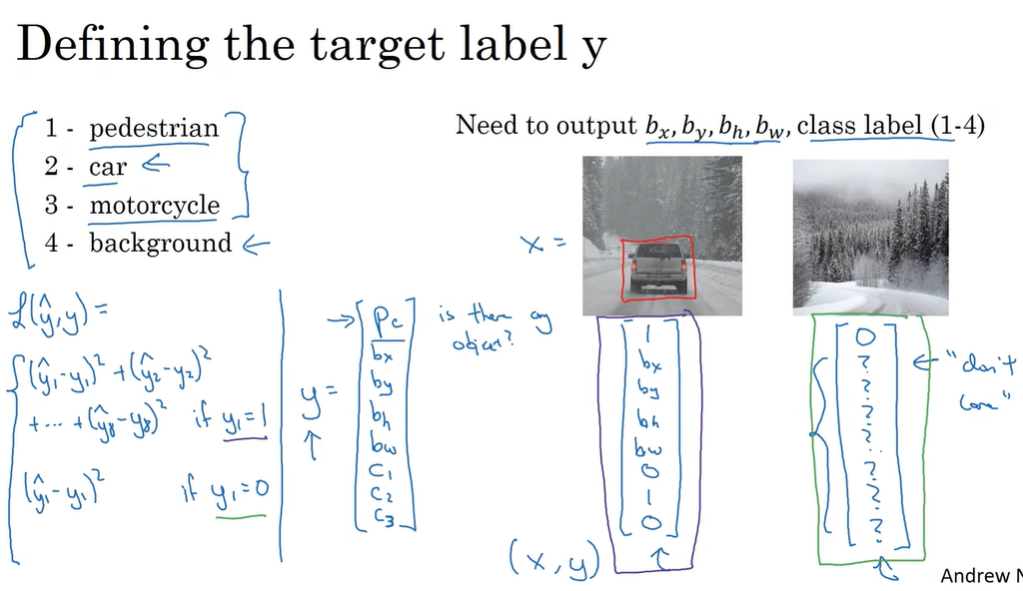
目标定位
pc表示是否是物体(前三个中的一个)
b表示位置(坐标+高宽)
c表示哪一类
特征点检测
output:输出点坐标
目标检测
先剪裁出来训练网络是否检测出来(0,1),然后用滑动窗口遍历进行检测。缺点:计算成本,粗细粒度会影响效果。
卷积的滑动窗口实现
用卷积实现fc:
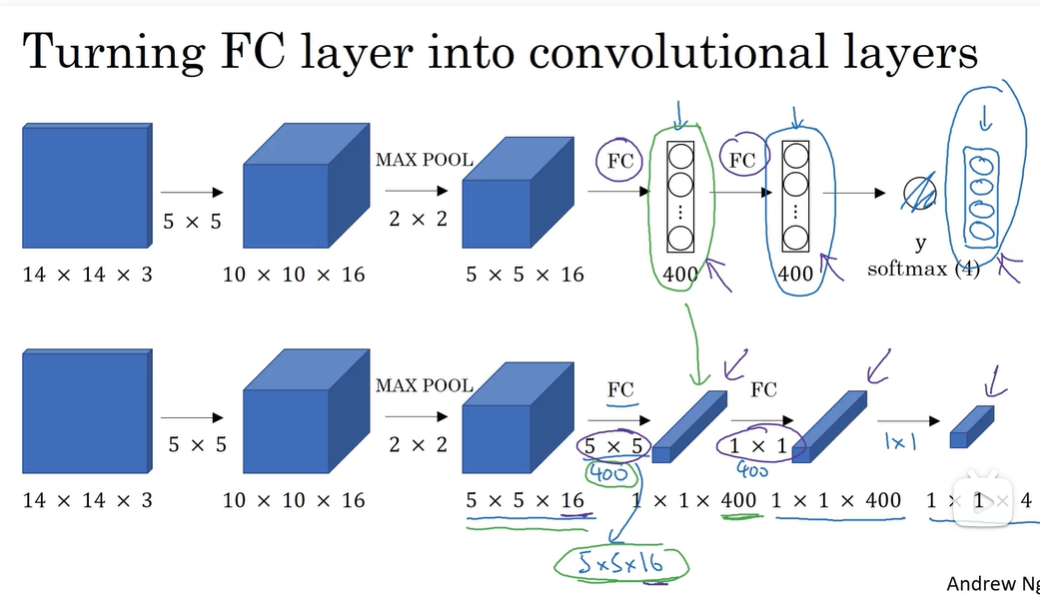 将他们作为一张图片输入给卷积网络进行计算,有很多公共区域可以共享很多计算
将他们作为一张图片输入给卷积网络进行计算,有很多公共区域可以共享很多计算

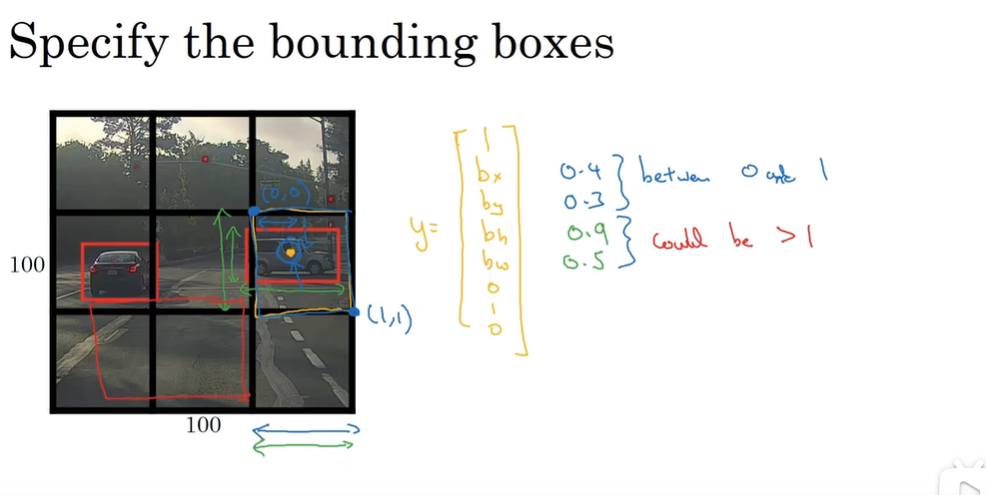
Bouding box检测
YOLO:更加精细
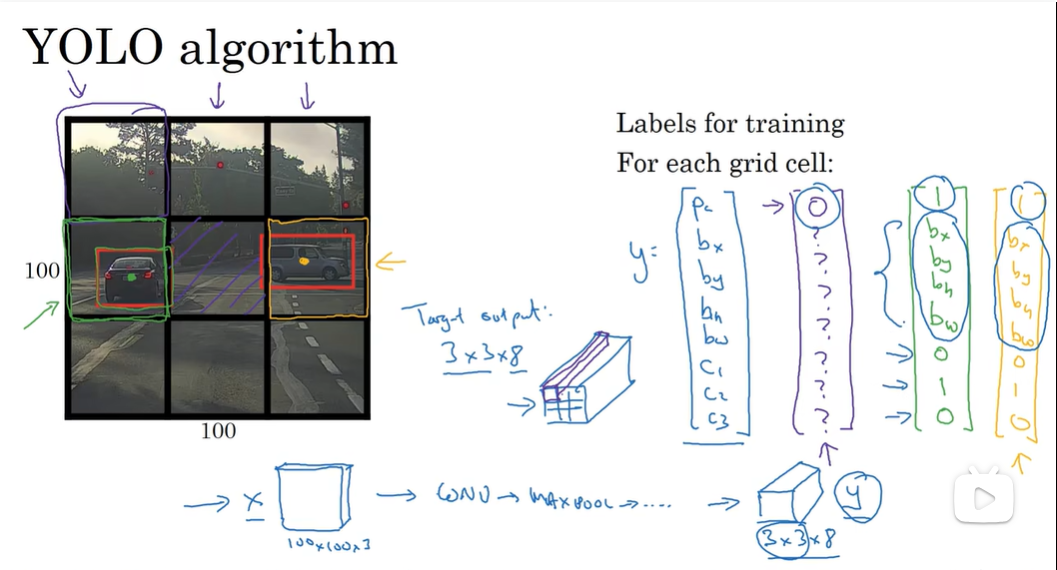 取框的中点,属于哪个区域就分给哪个。如果有的话pc=1,bx,by是中点相对于这个格子的位置,必须处于01之间,bw,bh是相对于格子的比例,可以大于1。
取框的中点,属于哪个区域就分给哪个。如果有的话pc=1,bx,by是中点相对于这个格子的位置,必须处于01之间,bw,bh是相对于格子的比例,可以大于1。
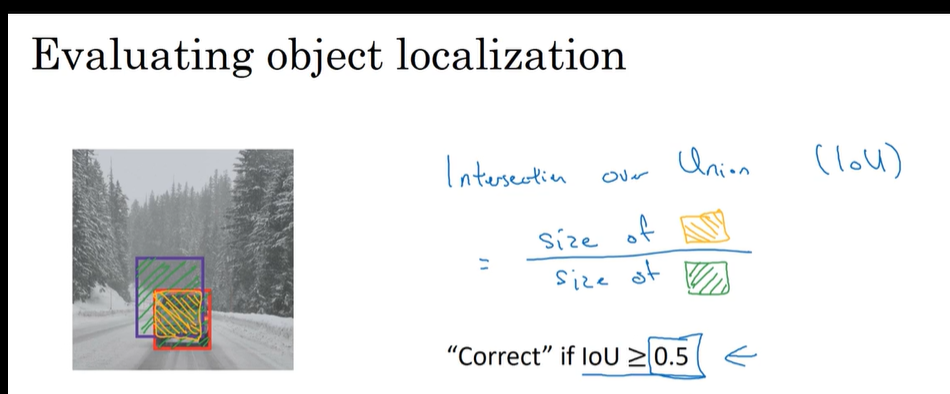
交并比 IoU
看检测出来的框和实际的框,衡量精确度
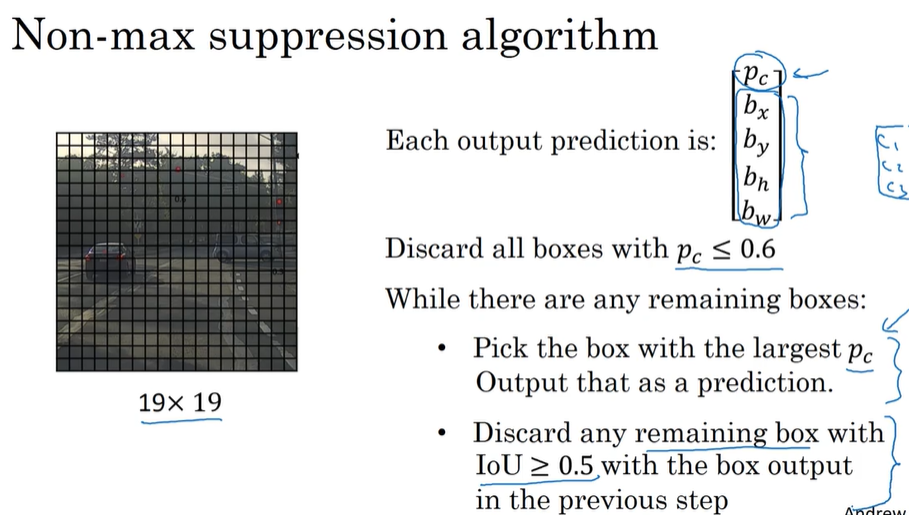
非极大值抑制
检测出来多个格子都有物体:
pc输出概率,取最大pc概率的框,逐一审视其他的框,抑制IoU很大的框
对于单个检测:
 如果是多个物体检测,需要每个输出类别都独立做一次非极大值抑制、
如果是多个物体检测,需要每个输出类别都独立做一次非极大值抑制、
Anchor Boxes
一个格子检测多个对象
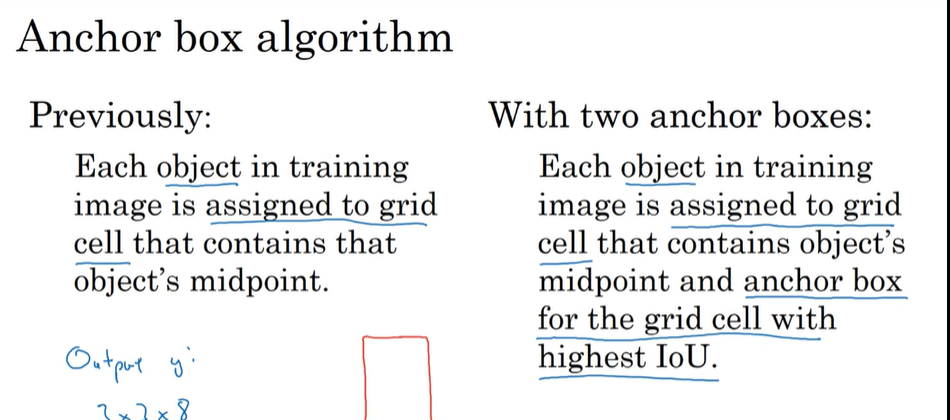 被分配到(grid cell, anchor box pair)
被分配到(grid cell, anchor box pair)
YOLO