边缘检测
前面几层检测边缘,中间检测物体部分,后面检测完整物体:
filter/kernel, ’*’ 这里表示卷积运算
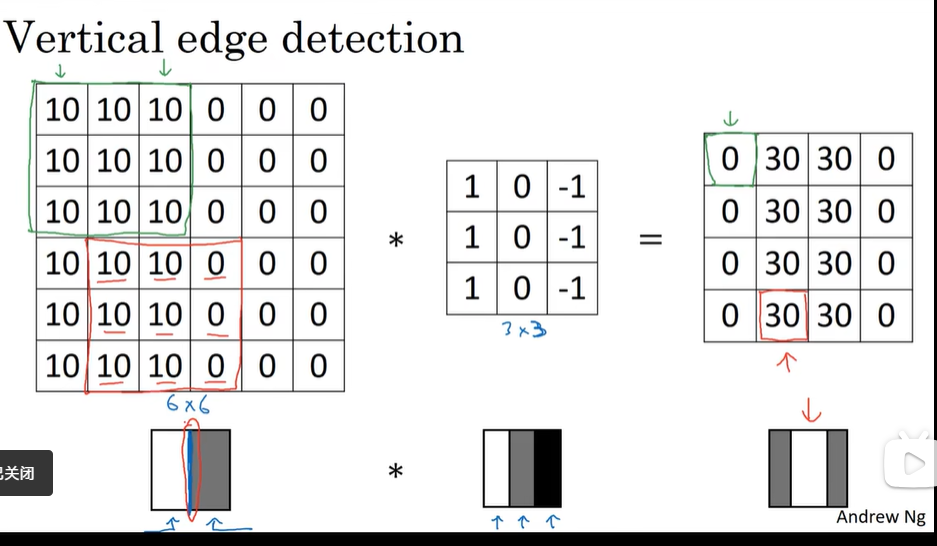 检测了中间竖线的边缘,卷积核表示竖左边是浅颜色,右边是深颜色→边缘竖线
检测了中间竖线的边缘,卷积核表示竖左边是浅颜色,右边是深颜色→边缘竖线
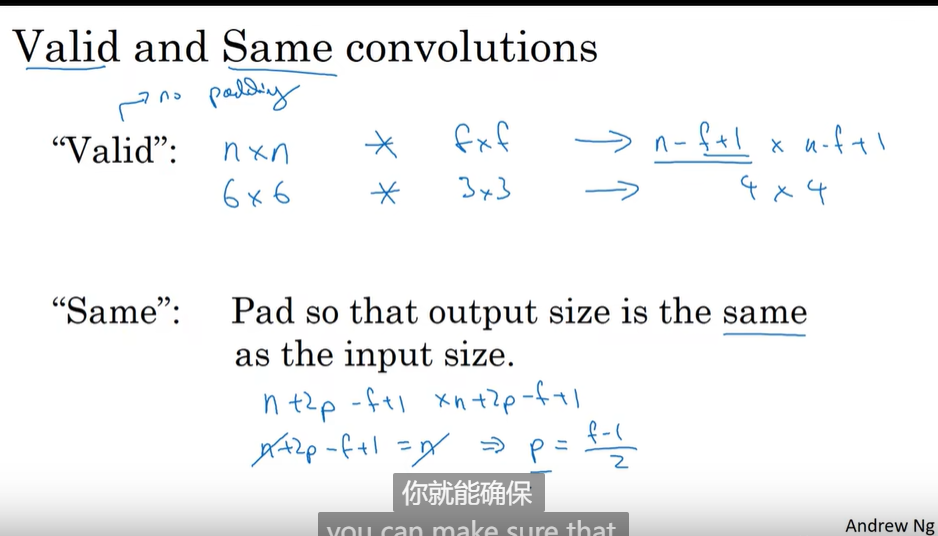
Padding
kernel:f*f 最后矩阵大小(n-f+1)*(n-f+1) (f一般是奇数 防止不对称过滤,且中间像素点会有帮助) padding: p 最后矩阵大小(n+2p-f+1)*(n+2p-f+1)
步长Stride
向下取整表示如果kernel未完全覆盖的部分不做计算: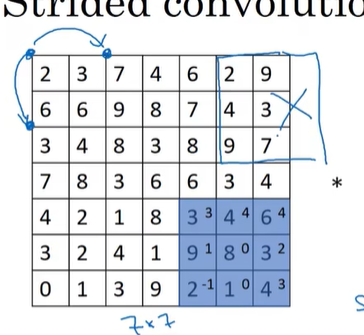
三维卷积
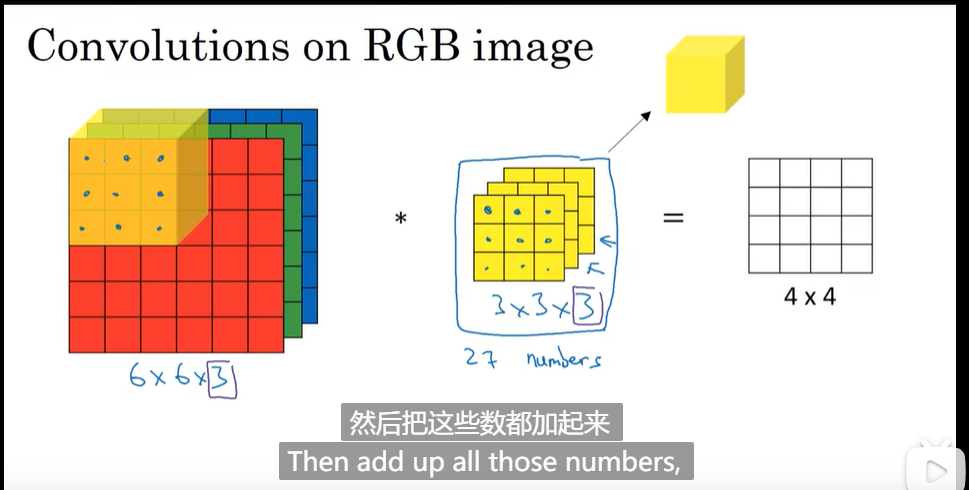 每个channel 可以有不同的高和宽
每个channel 可以有不同的高和宽
 :通道数 : filter个数
output最后一个维度是filter数量
:通道数 : filter个数
output最后一个维度是filter数量
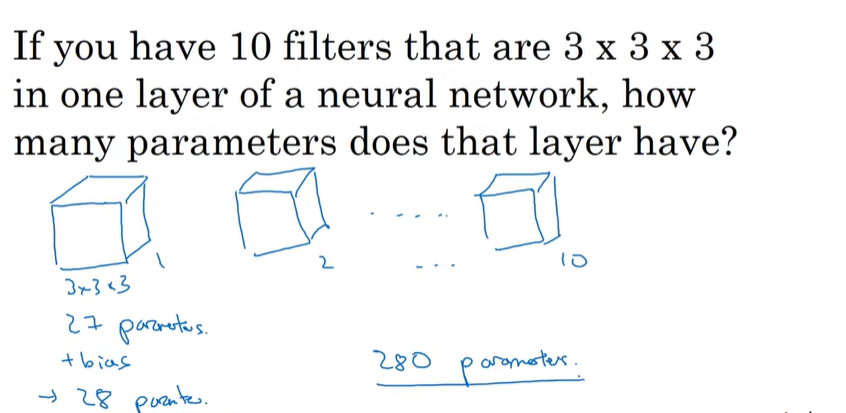
单层卷积网络
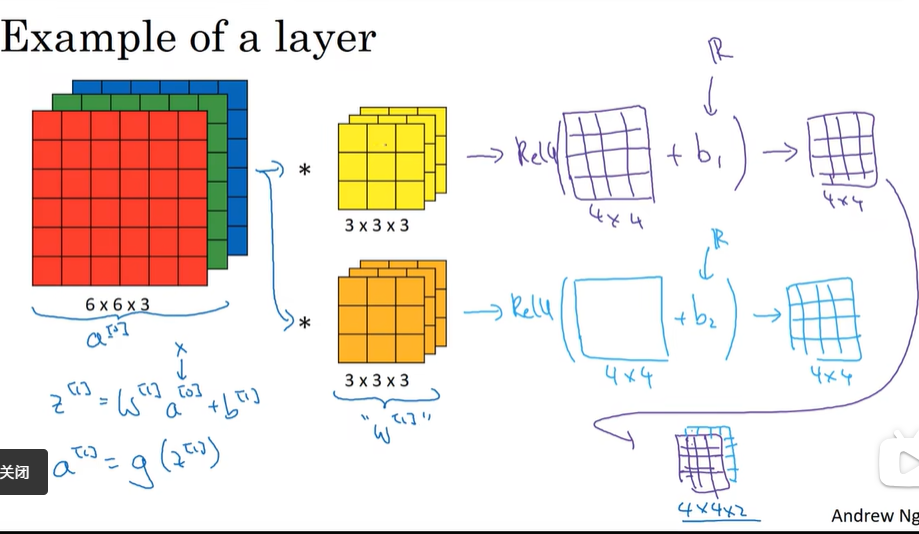
每个filter有一个Bias
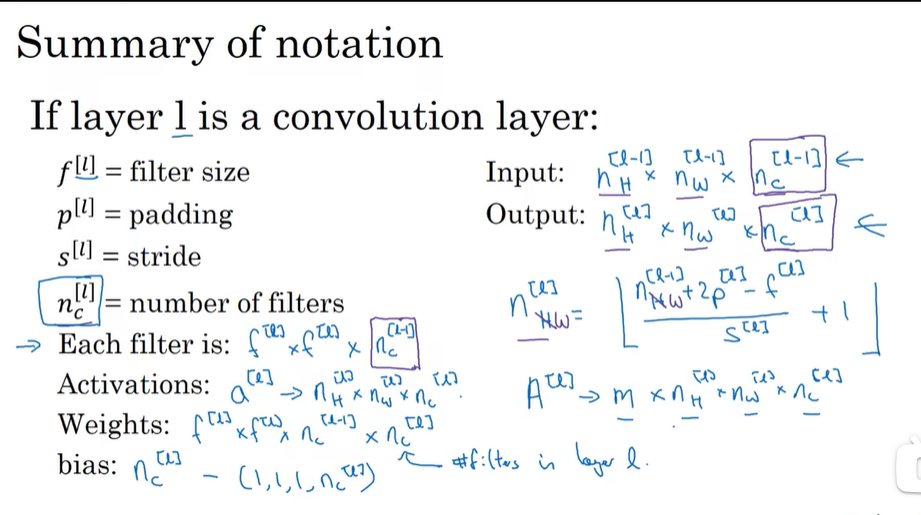 l:l层
l:l层
简单卷积网络
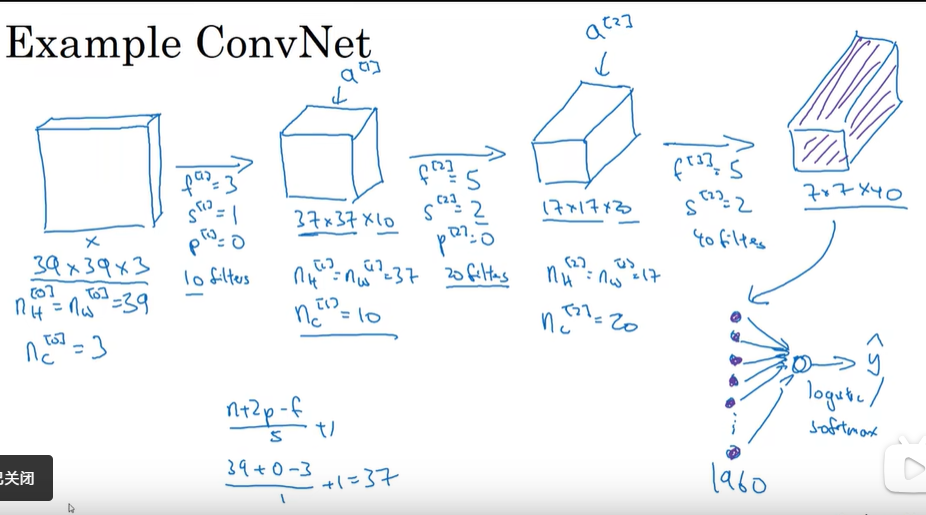 最后展成一维向量,用softmax计算
最后展成一维向量,用softmax计算
池化层
缩减模型大小,提高计算速度,提高所提取特征的鲁棒性
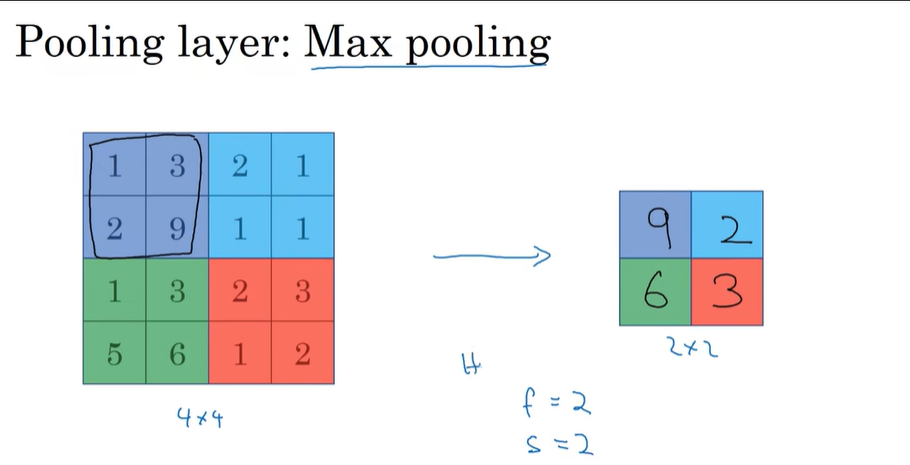 相当于用f=2,s=2(hyper parameters)的filter,通常不用padding
作用:如果提取到某个特征,取他的最大值
但是no parameters to learn,因为固定了f,s
相当于用f=2,s=2(hyper parameters)的filter,通常不用padding
作用:如果提取到某个特征,取他的最大值
但是no parameters to learn,因为固定了f,s
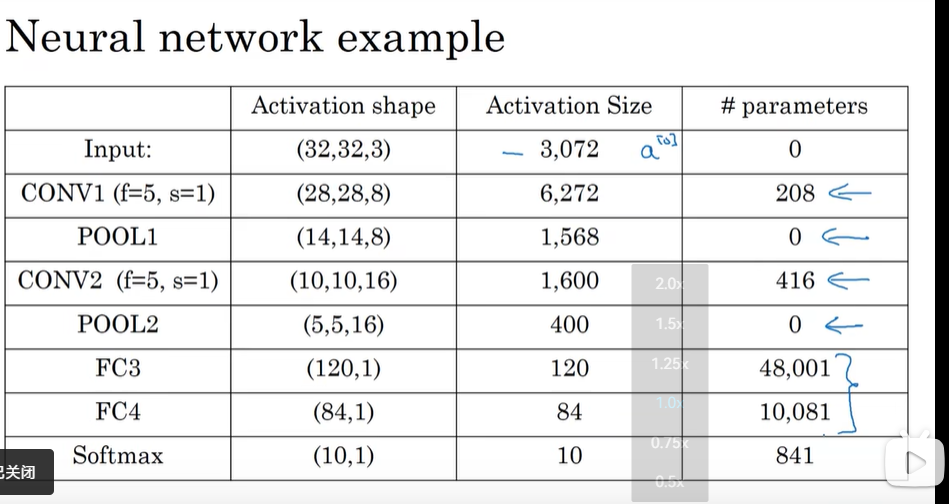 大量参数存在于fc nn中
大量参数存在于fc nn中
一般随着深度增加,高和宽减少,通道数增加
Why 卷积
相比于fc, convolutional layer好处在于 参数共享 和 稀疏连接:
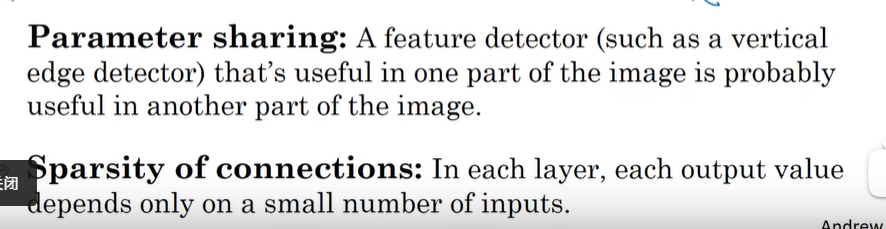 通过这两种方式减小参数量,当用小数据集训练时预防过拟合
还可以善于捕捉平移不变性(translation invariance)
通过这两种方式减小参数量,当用小数据集训练时预防过拟合
还可以善于捕捉平移不变性(translation invariance)